i centri del ginocchio
Dall’analisi sulla dinamica roto-traslatoria si deduce che nella meccanica di flesso-estensione il ginocchio non esegue un puro moto rotatorio imperniato su un unico centro fisso, ma questi si sposta in funzione del grado di flessione raggiunto.
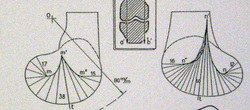
Dalla massima estensione ai 25° di flessione il centro di rotazione rimane posizionato in un punto fisso (centro iniziale di rotazione); dopo i 25-30 gradi di flessione il tende a spostarsi in maniera sempre più rilevante verso le superfici articolari (centro istantaneo di rotazione),
Kapandji ha schematizzato la locazione dei centri di rotazione, dando anche una possibile distanza dalle superfici articolari.
Dalla massima estensione ai 25° di flessione il centro di rotazione rimane posizionato in un punto fisso (centro iniziale di rotazione); dopo i 25-30 gradi di flessione il tende a spostarsi in maniera sempre più rilevante verso le superfici articolari (centro istantaneo di rotazione),
Kapandji ha schematizzato la locazione dei centri di rotazione, dando anche una possibile distanza dalle superfici articolari.
La diversa localizzazione del centro di rotazione comporta una variazione di lunghezza della gamba ai vari angoli di flessione:
la distanza Ra tra il centro iniziale di rotazione ed un punto antropometrico individuato sulla gamba (malleolo) è maggiore di Rb quale distanza tra il centro istantaneo di rotazione individuato alla massima flessione e lo stesso punto malleolare.
la distanza Ra tra il centro iniziale di rotazione ed un punto antropometrico individuato sulla gamba (malleolo) è maggiore di Rb quale distanza tra il centro istantaneo di rotazione individuato alla massima flessione e lo stesso punto malleolare.
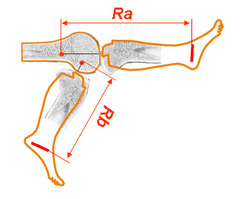
La differenza Ra - Rb può essere intesa come ΔR.
Da quanto sopra si può dedurre che se il ginocchio viene reso solidale ad un dispositivo meccanico che ruota attorno ad un centro fisso, la differenza che si viene a creare tra la traiettoria del ginocchio e quella del dispositivo meccanico, produce un allontanamento tra i capi articolari stessi in quanto il sistema meccanico è più “forte” di quello organico e trascina i capi articolari sulla propria traiettoria che non cambia la sua ampiezza.
Da quanto sopra si può dedurre che se il ginocchio viene reso solidale ad un dispositivo meccanico che ruota attorno ad un centro fisso, la differenza che si viene a creare tra la traiettoria del ginocchio e quella del dispositivo meccanico, produce un allontanamento tra i capi articolari stessi in quanto il sistema meccanico è più “forte” di quello organico e trascina i capi articolari sulla propria traiettoria che non cambia la sua ampiezza.
