| articolo-teorema-ita.pdf |
Pellis G.
Atti del XIX edizione del Convegno di Traumatologia e Riabilitazione Sportiva, Bologna, 2010, Calzetti Editore, Perugia
Atti del XIX edizione del Convegno di Traumatologia e Riabilitazione Sportiva, Bologna, 2010, Calzetti Editore, Perugia
Teorema del centro di rotazione variabile relativo al moto fisiologico del ginoccchio
Enunciato
Dato che nel suo movimento naturale il ginocchio compie un moto roto – traslatorio il suo reale grado di flessione tra i capi articolari dopo i 30° dipende dalla posizione del centro di rotazione.
Ciò comporta una differenza tra l’angolo misurato con un sistema goniometrico e quello realmente percorso dal ginocchio.
Ipotesi
Il movimento di flessione del ginocchio dopo una prima fase di rotazione su una traiettoria circolare prosegue con una fase di roto-traslazione contraddistinta dalla progressiva diminuzione della distanza tra il punto di rotazione e la superficie articolare.
Tesi
L’angolo di flessione raggiunto dal ginocchio dopo aver compiuto il fisiologico moto roto-traslatorio, è diverso dall’angolo valutato unicamente con un sistema goniometrico; in considerazione di ciò, la valutazione dell’ampiezza del movimento del ginocchio deve prevedere un sistema che tenga conto dello spostamento istantaneo del centro di rotazione.
Dimostrazione
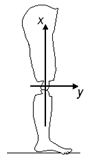
La posizione del centro istantaneo di rotazione del ginocchio, inizialmente è posto sull’asse x quale prolungamento dell’asse longitudinale della coscia che nella estensione completa si sovrappone all’asse longitudinale x della gamba. In tale condizione il centro iniziale di rotazione del ginocchio coincide con l’origine del sistema di riferimento cartesiano ortogonale xOy.
Dato che nel suo movimento naturale il ginocchio compie un moto roto – traslatorio il suo reale grado di flessione tra i capi articolari dopo i 30° dipende dalla posizione del centro di rotazione.
Ciò comporta una differenza tra l’angolo misurato con un sistema goniometrico e quello realmente percorso dal ginocchio.
Ipotesi
Il movimento di flessione del ginocchio dopo una prima fase di rotazione su una traiettoria circolare prosegue con una fase di roto-traslazione contraddistinta dalla progressiva diminuzione della distanza tra il punto di rotazione e la superficie articolare.
Tesi
L’angolo di flessione raggiunto dal ginocchio dopo aver compiuto il fisiologico moto roto-traslatorio, è diverso dall’angolo valutato unicamente con un sistema goniometrico; in considerazione di ciò, la valutazione dell’ampiezza del movimento del ginocchio deve prevedere un sistema che tenga conto dello spostamento istantaneo del centro di rotazione.
Dimostrazione
La posizione del centro istantaneo di rotazione del ginocchio, inizialmente è posto sull’asse x quale prolungamento dell’asse longitudinale della coscia che nella estensione completa si sovrappone all’asse longitudinale x della gamba. In tale condizione il centro iniziale di rotazione del ginocchio coincide con l’origine del sistema di riferimento cartesiano ortogonale xOy.
Volendo descrivere il progressivo spostamento dell’asse di rotazione del ginocchio stabilito che Ra è il primo raggio di rotazione che giace sull’asse y, la traiettoria di flesso-estensione della gamba sulla coscia può essere analiticamente definita:
per α < 30° il movimento del ginocchio si può descrivere come un sistema rigido che ruota attorno ad un centro fisso: la traiettoria eseguita dal punto P ha come equazione quella di una circonferenza
per α < 30° il movimento del ginocchio si può descrivere come un sistema rigido che ruota attorno ad un centro fisso: la traiettoria eseguita dal punto P ha come equazione quella di una circonferenza
per 30° ≤ α < 135°, il centro di rotazione si sposta verso la superficie articolare di una quantità pari a ∆x.
Le nuove coordinate del punto P diventano
Le nuove coordinate del punto P diventano
L’equazione del centro di rotazione del ginocchio risulta essere:
Dove Rb è il vero (effettivo) raggio di rotazione che cambia con il mutare di α, con Rb < Ra
Quando α è l’angolo tra l’asse x ed il raggio di rotazione, i valori di x, X, y e Y possono essere così ottenuti:
Quando α è l’angolo tra l’asse x ed il raggio di rotazione, i valori di x, X, y e Y possono essere così ottenuti:
Quindi per un dato valore di α compreso tra i 30° e 135° la posizione del centro istantaneo di rotazione può essere calcolata:
Applicazione pratica – la nuova scala angolare
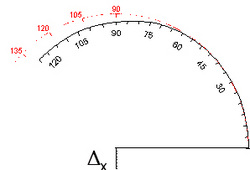
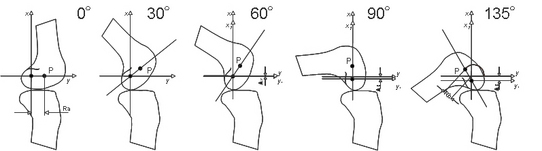
Da quanto sopra, risulta che nel movimento roto-traslatorio il punto periferico P segue una curva con un andamento a spirale rientrante verso il centro.
Ciò comporta che la scala per la valutazione dell’angolo reale del ginocchio deve essere costruita dalla sequenza di punti di estremità P del raggio Ra, la cui seconda estremità (che coincide inizialmente con l’origine del sistema di riferimento xOy) dopo i 30 gradi si muove lungo l’asse x di un’ entità pari a ∆x.
Pertanto sulla curva a spirale, le indicazione di riferimento angolare (Fig. 1) devono essere poste in funzione della nuova origine xO’Y conseguente allo slittamento istantaneo del sistema goniometrico lungo l’asse x, con O’ = O + ∆x, nuovo centro istantaneo di rotazione.
Da quanto sopra, risulta che nel movimento roto-traslatorio il punto periferico P segue una curva con un andamento a spirale rientrante verso il centro.
Ciò comporta che la scala per la valutazione dell’angolo reale del ginocchio deve essere costruita dalla sequenza di punti di estremità P del raggio Ra, la cui seconda estremità (che coincide inizialmente con l’origine del sistema di riferimento xOy) dopo i 30 gradi si muove lungo l’asse x di un’ entità pari a ∆x.
Pertanto sulla curva a spirale, le indicazione di riferimento angolare (Fig. 1) devono essere poste in funzione della nuova origine xO’Y conseguente allo slittamento istantaneo del sistema goniometrico lungo l’asse x, con O’ = O + ∆x, nuovo centro istantaneo di rotazione.