| articoloroto-traslazione-ita.pdf |
Pellis G., Di Cosmo F.
Calzetti Editore, Perugia, atti del XVIII edizione del Convegno di Traumatologia e Riabilitazione Sportiva, Bologna, 2009
Calzetti Editore, Perugia, atti del XVIII edizione del Convegno di Traumatologia e Riabilitazione Sportiva, Bologna, 2009
Il moto ROTO-TRASLATORIO: Studio sperimentale,
analisi matematica, dispositivo ortopedico
Premessa - ll movimento relativo di femore e tibia consiste, per i primi 30° di flessione, nel rotolamento del femore, fra i 30 e i 135 gradi si associa una progressiva traslazione anteriore dei condili femorali. Ciò comporta che il centro di rotazione del ginocchio non sia fisso, bensì variabile in relazione al grado di flessione articolare.
Un tutore per il ginocchio, dovrebbe tenere in considerazione questo dato ampiamente confermato dalla letteratura.
Scopo del lavoro - è dimostrare le basi matematiche del progetto alla base di un dispositivo meccanico che rispetti tale variabilità di posizione del centro roto-traslatorio del ginocchio.
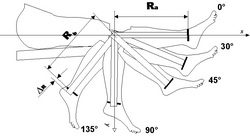
Materiali e metodi - Si è utilizzata una "leg extension" sulla quale è stato aggiunto un sistema per la misurazione della posizione del malleolo peroneale rispetto al centro di rotazione (fisso) della macchina. Ciò allo scopo di misurare l'apparente accorciamento della gamba nella flessione. Si è scelto di prendere il malleolo come riferimento a distanza della posizione del piatto tibiale per la difficoltà di una misurazione diretta. Posto che, sul piano sagittale, il centro iniziale di rotazione del ginocchio coincida con l’incrocio degli assi x ed y, si assume che, nella completa estensione del ginocchio, l'asse x della gamba , si trovi allineato con l’asse y del femore.
Partendo dall'ipotesi che, nel movimento di flessione del ginocchio, il centro istantaneo di rotazione (P) vari la propria posizione, rispetto al piatto tibiale, avvicinandosi allo stesso, si è voluto quantificare l'entità di tale spostamento.
A tal fine si è utilizzata una "leg extension" associata a un sistema di misurazione della distanza fra il centro di rotazione fisso della macchina e l'apice del malleolo esterno della gamba ottenendo una misura indiretta dello spostamento del centro di rotazione rispetto al piatto tibiale. Detta Ra la distanza misurata a ginocchio esteso ed Rb quella misurata a ginocchio flesso, si è calcolato il ΔR corrispondente a Ra - Rb.
Lo studio è stato effettuato su 83 soggetti maschi di età compresa fra i 16 ed i 19 anni (statura media cm 173,8 ± 5,89). I rilevamenti sono stati effettuati in estensione, a 30, 45, 90 e 135 gradi di flessione.
Un tutore per il ginocchio, dovrebbe tenere in considerazione questo dato ampiamente confermato dalla letteratura.
Scopo del lavoro - è dimostrare le basi matematiche del progetto alla base di un dispositivo meccanico che rispetti tale variabilità di posizione del centro roto-traslatorio del ginocchio.
Materiali e metodi - Si è utilizzata una "leg extension" sulla quale è stato aggiunto un sistema per la misurazione della posizione del malleolo peroneale rispetto al centro di rotazione (fisso) della macchina. Ciò allo scopo di misurare l'apparente accorciamento della gamba nella flessione. Si è scelto di prendere il malleolo come riferimento a distanza della posizione del piatto tibiale per la difficoltà di una misurazione diretta. Posto che, sul piano sagittale, il centro iniziale di rotazione del ginocchio coincida con l’incrocio degli assi x ed y, si assume che, nella completa estensione del ginocchio, l'asse x della gamba , si trovi allineato con l’asse y del femore.
Partendo dall'ipotesi che, nel movimento di flessione del ginocchio, il centro istantaneo di rotazione (P) vari la propria posizione, rispetto al piatto tibiale, avvicinandosi allo stesso, si è voluto quantificare l'entità di tale spostamento.
A tal fine si è utilizzata una "leg extension" associata a un sistema di misurazione della distanza fra il centro di rotazione fisso della macchina e l'apice del malleolo esterno della gamba ottenendo una misura indiretta dello spostamento del centro di rotazione rispetto al piatto tibiale. Detta Ra la distanza misurata a ginocchio esteso ed Rb quella misurata a ginocchio flesso, si è calcolato il ΔR corrispondente a Ra - Rb.
Lo studio è stato effettuato su 83 soggetti maschi di età compresa fra i 16 ed i 19 anni (statura media cm 173,8 ± 5,89). I rilevamenti sono stati effettuati in estensione, a 30, 45, 90 e 135 gradi di flessione.
Risultati - Sono stati raccolti nella tabella 1.
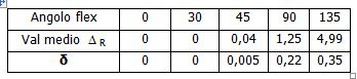
Essi evidenziano che il raggio di rotazione del ginocchio si mantiene costante fino a circa 30 gradi di flessione, (traiettoria circolare). Per angoli superiori ai 30° il raggio di rotazione diminuisce del valore ΔR.
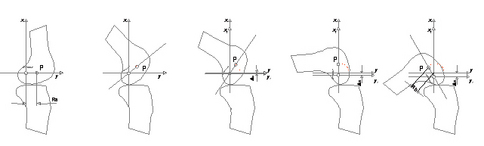
In altre parole il movimento di flessione del ginocchio dopo una prima traiettoria circolare associa uno scivolamento evidenziato dalla progressiva diminuzione della distanza tra il centro di rotazione e la superficie articolare tibiale. Lo spostamento del punto P può essere rappresentato per i primi gradi dall'equazione:
In altre parole il movimento di flessione del ginocchio dopo una prima traiettoria circolare associa uno scivolamento evidenziato dalla progressiva diminuzione della distanza tra il centro di rotazione e la superficie articolare tibiale. Lo spostamento del punto P può essere rappresentato per i primi gradi dall'equazione:
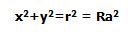
che corrisponde ad una circonferenza e per il successivo range di movimento, sino ai 135° di flessione, dall'equazione:

Pare importante rilevare che quando ΔR è sufficientemente piccolo rispetto Ra lo spostamento del centro di rotazione lungo l'asse x può essere trascurato.
Ciò è stato ottenuto inserendo su una prima piastra (femorale) due perni: uno centrale, posto in corrispondenza dell’intersezione degli assi x,y ed uno periferico posto in corrispondenza del punto P. Su una seconda piastra (tibiale), sono state ricavate due aperture, una periferica con un percorso circolare per i primi 30°, che assume poi un andamento a spirale analogamente al percorso seguito dal punto P ed una centrale, che ha origine in un punto corrispondente all’intersezione degli assi x.y, con un’estensione lungo l’asse x pari al ΔR come sopra calcolato.
Tale sistema meccanico, quando utilizzato come snodo per un tutore del ginocchio, risulta quindi rispettoso dei rapporti dinamici delle componenti articolari ossee e capsulo-legamentose.
Conclusioni - Il dispositivo meccanico ripropone il moto roto-traslatorio del ginocchio e può essere utilizzato con vantaggio in tutti gli apparecchi ortopedico-riabilitativi, che coadiuvano il ginocchio nel suo movimento di flesso-estensione. Esso infatti non crea conflitti tra la traiettoria fisiologica e quella meccanica tali da scatenare tensioni nocive agli organi traumatizzati.
Ulteriori riflessioni sul parallelismo ginocchio/dispositivo in quanto hanno fatto nascere la convinzione che la movimentazione roto-traslatoria debba essere applicata anche ad uno strumento di valutazione per una “reale” misura del grado di flesso estensione del ginocchio.
Conclusioni - Il dispositivo meccanico ripropone il moto roto-traslatorio del ginocchio e può essere utilizzato con vantaggio in tutti gli apparecchi ortopedico-riabilitativi, che coadiuvano il ginocchio nel suo movimento di flesso-estensione. Esso infatti non crea conflitti tra la traiettoria fisiologica e quella meccanica tali da scatenare tensioni nocive agli organi traumatizzati.
Ulteriori riflessioni sul parallelismo ginocchio/dispositivo in quanto hanno fatto nascere la convinzione che la movimentazione roto-traslatoria debba essere applicata anche ad uno strumento di valutazione per una “reale” misura del grado di flesso estensione del ginocchio.
