snodo KTJ a centro di rotazione variabile
Applicando l’analisi matematica riportata precedentemente ai risultati sperimentali, è stato possibile “disegnare” il percorso del ginocchio nel suo moto fisiologico.
E’ stato quindi progettato un dispositivo, strutturato con due piastre, una femorale ed una tibiale, sulle quali è stato riprodotto un sistema di movimentazione guidata costituito da due perni (posti sulla piastra femorale) che scorrono in due asole (poste sulla piastra tibiale).
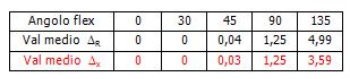
Il primo perno, centrale, è stato posto su ad una estremità della piastra femorale (in corrispondenza dell’intersezione degli assi x,y); analogamente sull’estremità della piastra tibiale è stato realizzato un foro quale punto di partenza di un’asola lineare che si sviluppa lungo l’asse x con un’estensione pari a Dx.
Il secondo perno è stato posto sulla piastra femorale ma sull’asse y ad una distanza Ra (in corrispondenza del punto P). Nello stesso punto, ma sulla piastra tibiale, è stato realizzato un foro dal quale è stata sviluppata un’apertura periferica, circolare per i primi 30° e, per i restanti 105°, a spirale rientrante verso il centro. La sequenza di punti che forma l’asse longitudinale di tale apertura è ricavata dalla sequenza di punti dell’estremità di un segmento di lunghezza “x,y – P” la cui seconda estremità si muove lungo l’asse longitudinale della prima apertura lineare.
La direzione di tale apertura e contraria alla direzione nella quale si sviluppa il moto roto-traslatorio dei condili femorali sui piatti tibiali.
Il primo perno, centrale, è stato posto su ad una estremità della piastra femorale (in corrispondenza dell’intersezione degli assi x,y); analogamente sull’estremità della piastra tibiale è stato realizzato un foro quale punto di partenza di un’asola lineare che si sviluppa lungo l’asse x con un’estensione pari a Dx.
Il secondo perno è stato posto sulla piastra femorale ma sull’asse y ad una distanza Ra (in corrispondenza del punto P). Nello stesso punto, ma sulla piastra tibiale, è stato realizzato un foro dal quale è stata sviluppata un’apertura periferica, circolare per i primi 30° e, per i restanti 105°, a spirale rientrante verso il centro. La sequenza di punti che forma l’asse longitudinale di tale apertura è ricavata dalla sequenza di punti dell’estremità di un segmento di lunghezza “x,y – P” la cui seconda estremità si muove lungo l’asse longitudinale della prima apertura lineare.
La direzione di tale apertura e contraria alla direzione nella quale si sviluppa il moto roto-traslatorio dei condili femorali sui piatti tibiali.
Il dispositivo meccanico così strutturato può essere utilizzato su tutti gli apparecchi ortopedico-riabilitativi che coadiuvano il ginocchio nel suo movimento di flesso-estensione.
