Il modello dell'arto inferiore
Per produrre correttamente un tutore bi-articolare o tri-articolare è indispensabile avere un modello di riferimento dell'arto che deve essere supportato dal dispositivo meccanico, in modo che tale dispositivo possa proporre più esattamente possibile la cinematica fisiologica al fine di non far insorgere tensioni nocive per il ginocchio stesso.
Particolarmente delicato, quindi, risulta il problema di far allineare gli assi di rotazione fisiologici di anca (all'occorrenza), ginocchio e caviglia dalla posizione degli stessi dipenda anche la lunghezza delle barre di supporto laterale che corrono superiormente il ginocchio lungo la coscia ed inferiormente lungo la tibia.
Molto importante per la completa vestibilità del tutore risultano anche essere i "cerchielli" che uniscono le barre laterali poste alla stessa altezza.
La realizzazione di tale modello, quindi, è determinante per il tecnico ortopedico che si occupa della realizzazione dei tutori bi-articolari (in genere utilizzati in pazienti con esiti di poliomielite) e/o tri-articolari per le applicazioni riabilitative sui paraplegici.
Con il modello, infatti, è possibile allineare gli assi fisiologici con quelli meccanici degli snodi, che devono avere una cinematica roto-traslatoria al ginocchio e rotatoria all'anca e/o alla caviglia. Tale rispetto si ripercuote sulla lunghezza delle barre laterali che devono essere di lunghezza perfettamente analoga con le distanze tra gli assi.
Solamente rispettando tali caratteristiche, il tutore meccanico può essere costruito proponendo l’esatta cinematica fisiologica dell’arto inferiore.
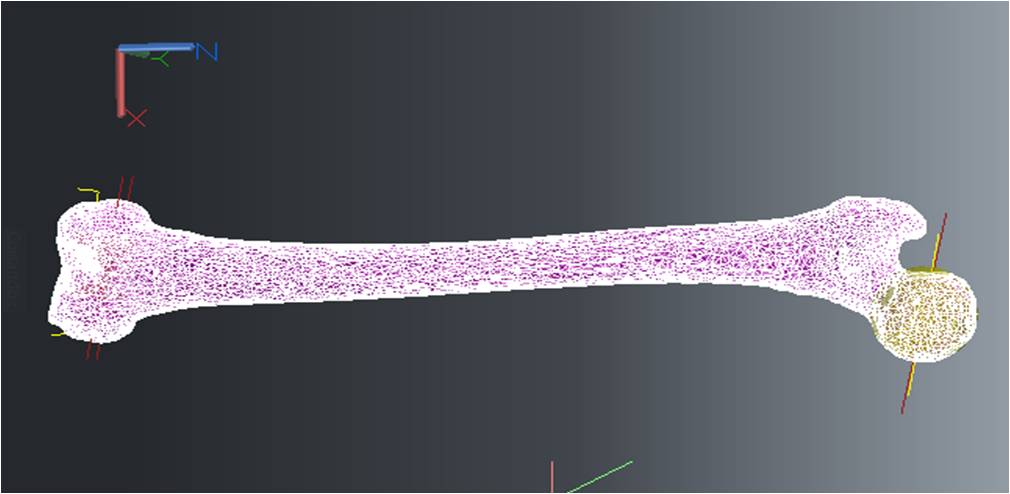
Per raggiungere il nostro scopo siamo quindi partiti da un’analisi radiografica dell’arto inferiore del paziente ottenuta tramite TAC dalla quale è possibile ricavare un file DICOM dalla cui segmentazione vengono separati 3 files che hanno la stessa georeferenziazione:
1 - femore
2 - astragalo e calcagno
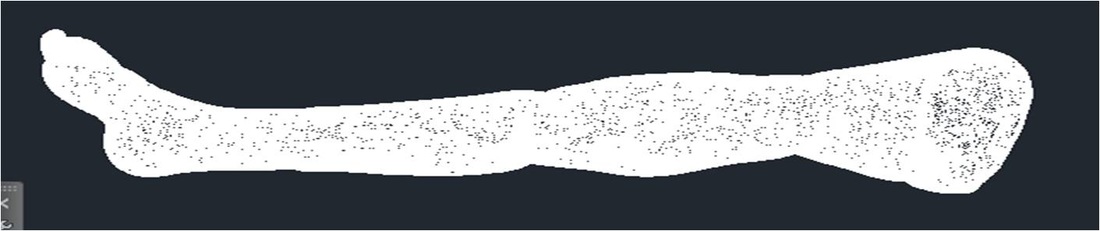
3 – superficie plastica epiteliale perimetrale
Particolarmente delicato, quindi, risulta il problema di far allineare gli assi di rotazione fisiologici di anca (all'occorrenza), ginocchio e caviglia dalla posizione degli stessi dipenda anche la lunghezza delle barre di supporto laterale che corrono superiormente il ginocchio lungo la coscia ed inferiormente lungo la tibia.
Molto importante per la completa vestibilità del tutore risultano anche essere i "cerchielli" che uniscono le barre laterali poste alla stessa altezza.
La realizzazione di tale modello, quindi, è determinante per il tecnico ortopedico che si occupa della realizzazione dei tutori bi-articolari (in genere utilizzati in pazienti con esiti di poliomielite) e/o tri-articolari per le applicazioni riabilitative sui paraplegici.
Con il modello, infatti, è possibile allineare gli assi fisiologici con quelli meccanici degli snodi, che devono avere una cinematica roto-traslatoria al ginocchio e rotatoria all'anca e/o alla caviglia. Tale rispetto si ripercuote sulla lunghezza delle barre laterali che devono essere di lunghezza perfettamente analoga con le distanze tra gli assi.
Solamente rispettando tali caratteristiche, il tutore meccanico può essere costruito proponendo l’esatta cinematica fisiologica dell’arto inferiore.
Per raggiungere il nostro scopo siamo quindi partiti da un’analisi radiografica dell’arto inferiore del paziente ottenuta tramite TAC dalla quale è possibile ricavare un file DICOM dalla cui segmentazione vengono separati 3 files che hanno la stessa georeferenziazione:
1 - femore
2 - astragalo e calcagno
3 – superficie plastica epiteliale perimetrale
|
|
|
Dall’elaborazione tridimensionale grafico-matematica sulla parte femorale e quella astragalica, sono stati localizzati gli assi di rotazione dell’anca, del ginocchio e della caviglia, determinanti per misurare le corrette distanze tra i singoli assi di rotazione.
Sfruttando il fatto che ogni singolo elemento osseo ha analoga georeferenziazione della superficie plastica epiteliale, è possibile sovrapporre quest’ultima ai primi in modo tale che gli assi ritrovati sulle strutture interne, possano sporgere ed essere rintracciabili all’esterno.
Sfruttando il fatto che ogni singolo elemento osseo ha analoga georeferenziazione della superficie plastica epiteliale, è possibile sovrapporre quest’ultima ai primi in modo tale che gli assi ritrovati sulle strutture interne, possano sporgere ed essere rintracciabili all’esterno.
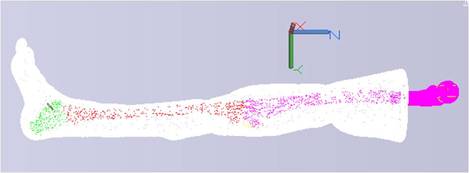
Si è così realizzato un modello in formato STL in scala 1:1che rispecchia esattamente le dimensioni (ed i volumi) della gamba del paziente con la peculiarità di avere ben in evidenza gli assi di rotazione.
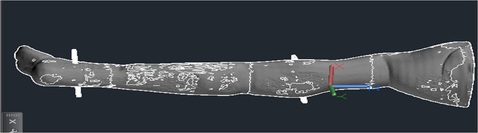
Nel nostro caso abbiamo realizzato il modello su stampante Makerbot con piano da 20x20x20 «tagliando la gamba» in 6 segmanti e successivamente incollandoli assieme e riempiti di espanso.

